Este destul de obișnuit pentru oameni - în special pentru cei care lucrează la fabricație - să lege un nod, să decupeze carcasa de pe un cablu, să introducă un știft într-un orificiu sau să utilizeze o unealtă manuală, cum ar fi un burghiu. Pot părea niște sarcini simple, dar sunt într-adevăr foarte complexe și implică mișcări extrem de fine ale degetului și mâinii.
Continut Asemanator
- Cum robotii au părăsit laboratorul și au început să îi ajute pe oameni
Deși roboții se implică din ce în ce mai mult în munca din fabrică și într-o gamă largă de alte tipuri de locuri de muncă - inclusiv în industria serviciilor și în îngrijirile de sănătate - dexteritatea lor nu este aproape la fel de impresionantă. De când oamenii i-au adus pentru prima dată să lucreze în fabricile de automobile cu mai bine de 50 de ani în urmă, am construit roboți care pot suda, vopsi și asambla piese destul de bine. Cele mai bune mâini robotizate de astăzi pot ridica obiecte familiare și le pot muta în alte locuri - cum ar fi luarea produselor din coșurile depozitului și introducerea lor în cutii.
Însă roboții nu pot orienta corect o unealtă de mână - spuneți, căptușind o șurubelniță cu capul Phillips cu canelurile pe un șurub sau vizând un ciocan către un cui. Și cu siguranță nu pot folosi două mâini împreună în moduri detaliate, cum ar fi înlocuirea bateriilor dintr-o telecomandă.
Mâinile umane sunt excelente la aceste sarcini și multe altele. Pentru a ajunge aproape să rivalizeze cu ceea ce mâinile noastre sunt ușor capabile, mâinile robotului au nevoie de o mai bună agilitate, fiabilitate și rezistență - și trebuie să poată simți mai exact și să se miște chiar mai fin decât o fac acum, pentru a-și da seama de ceea ce ” rețineți și cum să o strângeți cel mai bine. Pentru ca roboții să poată lucra alături de oameni, va trebui să ne gândim cum să facem roboți care să ne poată împrumuta literalmente când mâna noastră nu este suficientă.
Grupul meu de cercetare de la Universitatea Northeastern lucrează la acest lucru, în special pentru roboți umanoizi precum Valkyrie NASA, care are trei degete și un deget mare pe fiecare mână. Fiecare cifră are articulații asemănătoare la articulații și fiecare mână are o încheietură care se poate roti ușor. Lucrăm la crearea mișcărilor - combinații de mișcări ale brațului, încheieturii, a degetelor și a degetului mare care îndeplinesc colectiv o sarcină, cum ar fi deplasarea unei chei într-un cerc pentru a strânge un șurub sau a trage o căruță dintr-un loc în altul.
 Fiecare dintre acești roboți industriali are instrumente multiple specializate. Multe dintre sarcinile lor ar putea fi realizate cu mâini robotizate? (Steve Jurvetson / flickr, CC BY)
Fiecare dintre acești roboți industriali are instrumente multiple specializate. Multe dintre sarcinile lor ar putea fi realizate cu mâini robotizate? (Steve Jurvetson / flickr, CC BY) Importanța mâinilor
În loc să facem din fiecare robot o mașină personalizată, adaptată pentru o sarcină foarte specifică, trebuie să proiectăm roboți cu mai multe utilizări, sau chiar astfel de mașini capabile, care ar putea fi numite „scop general” - bune pentru aproape orice sarcină. Una dintre cheile succesului acestor tipuri de roboți vor fi mâinile excelente.
Munca noastră se concentrează pe proiectarea unei noi clase de mâini robot adaptabile, capabile să facă mișcări fine precise și să prindă autonom. Când roboții sunt capabili să bată cuiele, să schimbe bateriile și să facă alte mișcări similare - de bază pentru oameni, dar foarte complexe pentru roboți - vom fi în drumul nostru spre dexteritate asemănătoare omului în mâinile robotizate.
Atingerea acestui obiectiv implică, de asemenea, inventarea unor noi modele care să încorporeze elemente dure și moi - modul în care osul uman dă forță aderentei, pielea răspândind presiunea, astfel încât un pahar de vin să nu se spargă.
Dezvoltare și testare mai rapidă
Îmbunătățirile tehnologice moderne facilitează procesul de dezvoltare. Cu imprimarea 3D, putem realiza prototipuri foarte rapid. Putem face chiar componente de unică folosință cu un preț scăzut pentru a încerca diferite aranjamente ale mecanismelor, cum ar fi prindere cu două sau trei degete pentru sarcini simple de ridicare și plasare sau mâini de robot antropomorfe pentru operațiuni mai delicate.
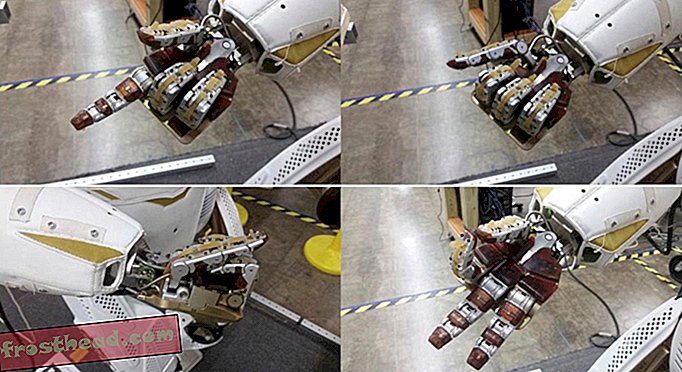 Diferite tipuri de mâini pe un robot Valkyrie NASA. (Universitatea de Nord-Est, CC BY-ND)
Diferite tipuri de mâini pe un robot Valkyrie NASA. (Universitatea de Nord-Est, CC BY-ND) Pe măsură ce camerele și senzorii electronici devin mai mici, putem să le încorporăm în moduri noi. De exemplu, dacă punem senzori de presiune și camere de luat vederi într-o mână robotizată, ei pot da feedback controlorului robotului (uman sau automat) atunci când o prindere este sigură sau dacă ceva începe să alunece. Într-o zi, ei ar putea să înțeleagă în ce direcție se mișcă obiectul de alunecare, astfel robotul îl poate prinde.
Aceste abilități sunt deja a doua natură a oamenilor prin viziune și propria percepție (capacitatea de a sesiza pozițiile relative ale părților corpului fără a privi sau a se gândi la ea). După ce le putem realiza în roboți, vor putea face lucruri precum detectarea dacă o apucare este prea puternică și stoarce un obiect prea tare.
Planificarea mișcărilor coordonate
O altă etapă va fi dezvoltarea de metode pentru roboți să își dea seama ce mișcări trebuie să facă în timp real, inclusiv să sesizeze ce se întâmplă în mâinile lor în fiecare moment. Dacă o mână a robotului poate detecta modificări ale obiectelor pe care le manipulează sau poate manipula obiectele în timp ce le ține, acestea ar putea ajuta la acele sarcini manuale comune, cum ar fi legarea nodurilor și dezbrăierea sârmei.
Lucrul cu două mâini împreună este și mai departe în viitor, deși ar oferi un impuls semnificativ, în special pentru producție. Un robot care poate acționa un burghiu cu două mâini sau poate trece piese de mașină de la o mână la alta ar fi îmbunătățiri mari, permițând fabricilor să automatizeze și mai mulți pași în procesele lor.
 Acesta este robotul viitorului? (NASA)
Acesta este robotul viitorului? (NASA) Noi, oamenii, nu am dezvoltat aceste sisteme încă. Atingerea dexterității robotilor autonome asemănătoare oamenilor îi va menține pe cercetătorii, tehnologii și inovatorii robotici ocupați în viitorul apropiat. Nu va încetini revoluția robotică în curs de fabricație, deoarece procesele actuale au încă mult spațiu pentru automatizare pentru a îmbunătăți siguranța, viteza și calitatea. Dar, pe măsură ce vom face roboți și mai buni, ei vor putea să ne dea o mână.
Acest articol a fost publicat inițial pe The Conversation.
Taskin Padir, profesor asociat de inginerie electrică și informatică, Universitatea Northeastern